Test standards often include shock testing to confirm product durability. Classical shock testing employs a sharp transfer of energy using a pre-defined shock pulse or user-defined transient pulse. When running a shock test, a test engineer will need to consider the shape of the shock pulse, the shock machinery, and the characteristics of transient pulses. Below, we address several frequently asked questions regarding classical shock testing.
Why shouldn’t I use multiple channel control for shock?
Average, maximum, and minimum are methods of multiple channel control. These methods are not recommended for shock testing because they can potentially cause severe damage to the vibration system and provide unreliable test results.
If the combined sensors do not move perfectly in phase, then the combined time signals might be noisy. The effect can be more significant as the phase difference increases. If the sensors approached 180 degrees out of phase, then the “average” would be near zero. When deriving the next output, the controller would try to increase the drive output to raise the average value to the demand level. This value could be significantly beyond the shaker’s capability and lead to physical damage. The same scenario can happen with the maximum and minimum methods as well.
What counts as a pulse?
A shock pulse is a transient excitation most often defined in terms of acceleration. Shock pulses excite a span of frequencies in a short period and dampen quickly. They are defined as either a classical shock pulse or a transient representation of a recorded event.
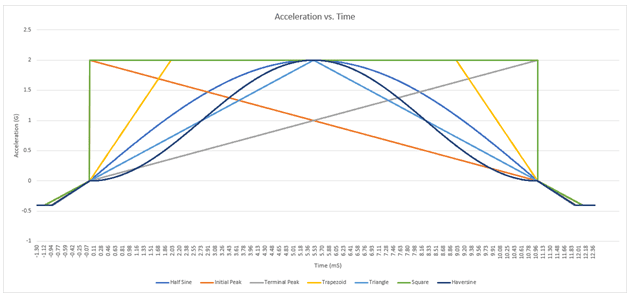
Classical shock pulses have a pre-defined shape, amplitude, direction, and duration. Common shapes include half-sine, initial-peak, terminal-peak, square, triangle, sawtooth, trapezoid, and haversine. If classical shock testing is required, the pulse shape will be defined in the test standards.
In VibrationVIEW, the pulse count method can be adjusted:
- The all pulses in run mode method will count all pulses after the test enters run mode. A test enters run mode after the first full-level pulse is in tolerance. Then, all pulses are counted including the first pulse. With this method, more low-level pulses will be required if the threshold voltage is set below the noise floor.
- The full level pulses method only counts pulses that are output at the full scheduled level. Any reduced level pulses generated with the manual controls will not be counted.
- The in-tolerance pulses method counts only pulses within the tolerance bands. If the test is running and a pulse does not meet tolerance, it is not counted.
- The full level + in-tolerance method only counts pulses that are output at the full scheduled level and meet tolerance.
Recorded events are used to recreate more complex shock pulses. A user-defined transient or the shock response spectrum (SRS) can be used to do so. Both are more advanced methods of shock testing.
When do I need to add pre-/post-pulse compensation?
Pre-/post-pulse compensation is necessary when running a classic shock test on a shaker. Shock machines, such as drop-shock, use some mechanical method to halt the table on which the product is mounted. Vibration shakers do not have this capability. Shakers can only generate a fixed amount of velocity and displacement, and continuous velocity and displacement can be dangerous and lead to damage. Therefore, pre-/post- compensation pulses must be added to stop the generated signal.
Compared to a mechanical shock machine, a shaker can be a reliable and efficient option for routine shock testing. To run a classical shock test on a shaker, however, the pulse must start and end at zero acceleration, velocity, and displacement. Pre-/post- compensation pulses are used to drive the shaker to these zero parameters.
The compensation pulses will change the frequency content generated by the standard pulse. The extent of the change can be minimized but is a trade-off when using a shaker rather than a mechanical shock machine. With a shaker system, however, you can apply positive and negative pulses without re-orienting the product, repeat the waveform shape, and use the same fixture as other vibration tests.
What is the difference between using a drop shock machine and an electrodynamic shaker?
For the previous question, we briefly discussed a mechanical difference when running a shock test on a drop shock machine versus an electrodynamic shaker. A drop shock machine can arrest movement using a mechanical method. A shaker cannot, so pre-/post- pulse compensation must be used instead.
Moreover, a drop shock machine is capable of large changes in velocity and displacement. While most classical shock pulses are defined in units of acceleration, the purpose of a shock test is to generate a delta-velocity and then determine its effect on the product. Drop tests were designed to generate a unipolar acceleration shape and a set delta-velocity.
When running a shock test on a shaker, velocity and displacement must be considered to generate a comparable change. Some testing standards have extended the tolerance requirements for pulses to include the time duration of the pre- and post-compensation pulses. The change requires lower amplitude pre- and post-compensation pulses, thereby extending the time duration and increasing the overall velocity and displacement. The goal is to make sure the delta velocity of a test generated on a shaker is similar to that of a mechanical shock machine.
Interested in learning more? Take our shock testing course on VRU and download a free demo of our VibrationVIEW software.